更新时间:2021-10-16 08:50:50
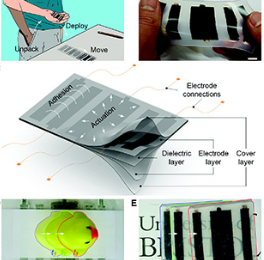
布里斯托大学的团队开发了一种可拉伸的皮肤状机器人,可以卷起来放在口袋里。该机器人采用了一种将人工肌肉和电附着嵌入软材料的新方法。
这一发表在《Soft Robotics》的新进展可能会创造新的用于环境监测和在危险环境中部署的轻型机器人、用于精致物体的机器人抓具和新的可穿戴技术。
传统机器人是刚性和不兼容的,而软机器人是兼容的,可以拉伸和扭曲以适应其环境。到目前为止,软机器人已经把它们的移动能力和抓取它们移动表面的能力分开了。由机器人学教授乔纳森罗希特(Jonathan Rossit)领导的布里斯托尔工程学院的研究人员,从生物皮肤、蜗牛和其他软体生物的灵感中获得了成功的演示。机器人通过交替收缩嵌入的人工肌肉和抓取表面,成功爬行整个表面。使用电荷。
在论文中,该团队描述了如何卷起皮肤机器人ElectroSkin,将其放入口袋中,然后将其拉出并扔在它的移动表面上。ElectroSkin是一系列软下一代机器人的新基本组件。
未来,ElectroSkin机器人可以爬墙过天花板进行清洁,探索难以到达的环境,包括倒塌的建筑,并可用于一系列可穿戴的第二皮肤设备。
Copyright © 2018-2022 环球门户网
.联系QQ: . 备案号:渝ICP备2021002616号-11  渝公网安备 50010302003618号
| 网站地图 | 百度地图
渝公网安备 50010302003618号
| 网站地图 | 百度地图











